摘要:为了研究区域内多个多功能一体化电子装备资源集约管控、自组织协同应用方式,构建了一种支持区域内多个分布式多功能一体化电子装备开展协同作战/博弈对抗的信号级数字仿真系统。提出一种“基于帧调度的变步长时间推进”与“独立事件驱动的时间推进”的联合时间推进机制,既能保证每个装备每帧探测仿真数据的完整性,又能实现系统内多个装备按照自身的时序同时有序推进。仿真结果表明:该仿真系统能够实现对抗场景想定、博弈对抗仿真及结果显示,可为多功能一体化装备作战应用方式研究提供理论依据和试验平台支撑。
关键词:多功能一体化电子系统;对抗仿真;信号级仿真;时间推进方式;事件驱动
论文《局域分布式多功能一体化信号级博弈对抗仿真系统设计》发表在《系统仿真学报》,版权归《系统仿真学报》所有。本文来自网络平台,仅供参考。
引言
未来战争的特征是体系化、一体化,任何单一电子装备或多种装备的功能叠加都难以保证有效对抗蓝方综合、智能、一体化的战场信息化网络 [1],区域内多个探侦干多功能一体化电子装备资源集约、协同运用是未来趋势。然而,探侦干一体化电子装备体制新颖、工作模式复杂多样,且采用真实装备进行试验演练时面临着周期长、风险大、成本高、难以精确评估等问题[2],装备的资源管控、协同运用方式面临巨大考验。依托现有仿真技术条件和模拟训练资源开展体系对抗模拟训练是缓解高技术装备训练耗费大与资源有限的有效途径[3]。通过对多功能电子装备、电磁环境等建立数学模型能够快速构建各种复杂战场环境,逼真再现装备间/内信息处理流程,真实反映装备在复杂环境下的系统性能及作战效能,开展装备应用方式设计与验证[4]。
然而,现有信号级博弈对抗数字仿真系统普遍存在3个问题:
(1) 现有基于单功能的雷达/电子战仿真系统 [5-6]仅对探测、侦察等独立的单功能进行信号级建模仿真,不能实现对多功能有机一体装备的工作模式、资源调度方式、协同运用方式等方面的仿真与验证,无法支撑未来多功能一体化电子装备的运用。
(2) 现有基于固定步长的时间推进方式 [7]存在2个问题:①每次推进固定时长破坏了探测帧信号的完整性,不利于后续信号处理的仿真,若对截断的探测帧进行拼接,则会带来额外的仿真开销;②该固定时间步长比较难以确定,因为仿真系统中存在多个探侦干多功能一体化装备,每个装备的工作模式、调度时序都不相同,难以准确确定仿真推进步长。
(3) 现有基于事件的时间推进方式 [8]存在以下问题:在基于事件驱动的仿真系统中,系统会将每个事件按照时间顺序逐个调用执行。当仿真系统时间推进到某个时刻时,会筛选出执行时刻小于或等于当前系统仿真时间的事件,然后执行满足条件的事件。这将导致整个仿真系统时间线被切割的太零碎,面临大量信号级的仿真数据拼接问题,仿真开销太大。
针对上述问题,本文设计了一种支持区域内多个多功能一体化电子装备开展分布式协同作战/博弈对抗的信号级数字仿真系统架构,并提出了一种“基于帧调度的变步长时间推进”与“独立事件推进”的联合时间推进机制,通过以基于装备帧调度的变步长时间驱动为基础,对每个时间步长内发生的事件进行先判断后执行的方式,既保证了每帧探测信号数据的完整性,又能实现系统内多个装备按照自身的时序同时有序推进。
1 仿真系统组成及工作原理
1.1 仿真系统功能组成
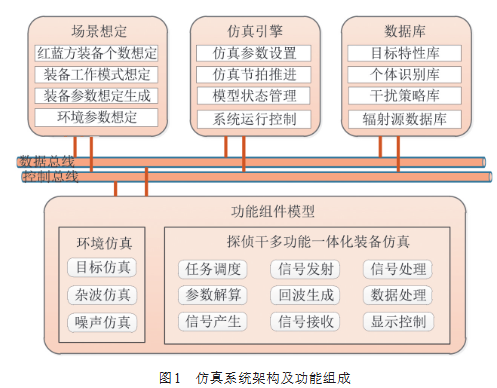
仿真系统组成如图1所示。
场景想定模块用于在仿真前预设仿真系统运行所需的基础信息和不确定信息,包括红蓝双方装备想定模块以及环境想定模块。装备想定模块包括红 蓝双方探侦干一体化装备个数想定、装备工作模式想定、装备参数想定生成,用于对探侦干一体化装备的工作模式、处理流程和工作参数进行设置,以及在雷达坐标系下对该工作模式下的波位进行预编排和发射方向图预生成,并对红蓝双方装备的RCS、起始坐标、运动速度等参数进行设置;环境想定模块用于对装备所处电磁空间内的目标、杂波、干扰、噪声等环境因素的参数进行设定。
仿真引擎模块负责维护整个仿真进程有序推进,用于实现仿真系统初始化、仿真参数设置、仿真节拍推进、模型状态管理,以及事件调度、接收和响应控制指令等系统运行控制等功能。
数据库模块用于支撑目标RCS 的产生、辐射源识别与干扰策略生成。
功能组件模型模块主要包括环境仿真模型和多功能一体化装备信号级仿真模型。其中,环境仿真模型用于在北东天坐标系下实时产生目标的位置、速度、RCS 等信息,以及环境中干扰、杂波、噪声、辐射源信号的产生。通过组件化的设计,基于场景想定中的不同配置,可以快速构建探侦干多功能一体化装备的不同工作模式、不同处理流程,实现探测、侦察、干扰或者多功 能一体等不同功能的信号级仿真。
1.2 仿真系统硬件组成
为了支撑区域内多个装备的信号级博弈对抗仿真,仿真系统可以配置在多个计算机上,以提升仿真效率。如图2 所示,信号级博弈对抗仿真系统由仿真运行控制与支撑、人机交互界面、仿真模型三大部分组成。每个仿真分系统由若干仿真节点组成,在仿真控制节点的控制下,每个仿真节点完成各自的仿真任务,多个仿真节点通过高速以太网进行数据与控制信息的交互。仿真系统也可根据仿真场景复杂度、装备数量对硬件规模进行缩减,多个仿真任务可以集成到同一个仿真节点上完成。
场景想定 仿真引擎 数据库
红蓝方装备个数想定 仿真参数设置 目标特性库
装备工作模式想定 仿真节拍推进 个体识别库
装备参数想定生成 模型状态管理 干扰策略库
环境参数想定 系统运行控制 辐射源数据库
功能组件模型
环境仿真 探侦干多功能一体化装备仿真
目标仿真 任务调度 信号发射 信号处理
杂波仿真 参数解算 回波生成 数据处理
噪声仿真 信号产生 信号接收 显示控制
Fig. 1 Simulation system architecture and composition 图1 仿真系统架构及功能组成
仿真运行控制与支撑 人机交互
场景想定仿真引擎数据记录与存储 人交
环境仿真
仿真模型 仿真N
图2 仿真系统硬件组成 Fig. 2 Hardware composition of simulation
1.3 仿真系统工作原理
仿真系统的工作原理如图3(a)所示。仿真开始前,通过红蓝双方的人机交互界面进行场景想定及仿真参数设置;参数设置完成后,下达仿真开始指令。仿真开始后,各仿真模块在仿真引擎的控制下按照一定的仿真节拍在数据流的驱动下执行既定功能仿真、数据交互,并将仿真结果回传给人机交互界面。仿真过程中,场景想定模块为多功能一体化装备仿真模块及环境仿真模块提供目标、干扰、噪声等参数支持;环境仿真模块根据仿真节拍为多功能一体化装备仿真模块提供实时干扰、噪声、杂波信号;仿真引擎与多功能一体化装备仿真模块之间不断进行信息交互,多功能一体化装备仿真模块为仿真引擎提供装备各仿真模块的状态信息和装备调度结果,仿真引擎根据一定的仿真系统时间推进准则给出系统仿真节拍,传给装备仿真模块及环境仿真模块。多功能一体化装备内部仿真原理及数据流如图3(b)所 示。仿真开始后,任务调度模块在仿真引擎的控制下执行任务调度和任务列表更新,并将任务列表传给参数解算模块;参数解算模块根据场景想定和当前仿真时刻解算当前仿真节拍下目标及干扰在雷达坐标系下的坐标,以及根据任务调度信息解算当前仿真节拍下一体化装备模型的各个模块的全局控制参数;信号产生模块根据控制参数中的工作模式、波形参数等信息产生基带探测信号波形/干扰信号波形/探干一体信号波形,再将基带信号送给信号发射模块;信号发射模块将基带信号调制为中频信号,再在仿真节拍的控制下根据控制参数中阵面参数、目标/干扰个数及位置等参数产生受发射方向图调制的探测发射波束信号/干扰发射波束信号;回波生成模块对发射波束信号添加电磁传播损耗、叠加环境信号后产生带有导向矢量的回波信号;信号接收模块根据控制参数对回波信号进行信道化及波束合成,生成探测波束/侦察波束/匿影波束/对消波束数据。 信号处理模块结合匿影波束数据、对消波束数据对探测波束数据进行抗干扰处理以及信道化脉压、滤波、检测等处理生成点迹信息,结合匿影波束对侦察波束数据进行包络检测、参数测量、辐射源匿影、分选等处理生成EDW 信息,具体处理流程可在场景想定中进行设置;数据处理模块对探测点迹进行关联滤波获得有源航迹信息,对EDW 进行批次管理获得无源航迹,再结合红方其他装备传来的数据及数据库信息综合研判获得综合航迹反馈给任务调度及显示模块。仿真过程中,可通过人机交互界面下达仿真控制指令, 修改装备的工作参数及工作模式,灵活开展信号级博弈对抗仿真。
2 仿真系统时间推进方式设计
为了实现多个装备信号级仿真的有序推进, 需要对仿真系统时间推进方式进行设计。本文提出的博弈对抗仿真系统时间推进方式具体包括2 个方面设计:
(1) 针对仿真系统中每个单装,提出基于探侦干一体化装备帧调度的变时间步长推进方式。
(2) 针对仿真系统内多个装备,提出联合时间与事件驱动的仿真系统时间推进机制。
2.1 单个装备基于装备帧调度的变时间步长推进方式设计
针对未来作战一体化装备系统更加复杂、工作模式更加多样等变化,本文提出一种基于探侦干一体化装备帧调度的可变步长仿真节拍设计方法。该方法能支持仿真系统中多个多功能一体化装备在不同工作参数、不同工作模式、不同调度时序下的仿真,大大提高了仿真的灵活度,减小了对仿真场景的限制,使仿真更贴近实际应用需求,能够对探侦干一体化装备的多功能工作模式及工作时序进行快速迭代优化,进而指导实装设 计。此外,基于帧调度的可变步长的仿真可以保证每帧仿真数据的完整性,减少数据拼接开销。
仿真系统中每个装备根据自身调度时长来推进装备各个模块的仿真节拍,基于探侦干一体化装备帧调度的变时间步长仿真节拍设计方法具体实现如下:
(1) 仿真控制模块更新当前仿真时刻 (t_{0})
(2) 仿真控制模块接收外界任务控制输入,若有输入,按照外界控制更新相应仿真参数或系统参数信息;若无输入,将当前仿真时刻 (t_{0}) 分发至各仿真模块,进入下一步。
(3)第 i 个装备的调度模块初始化/更新任务列表。初次执行时,初始化搜索任务、确认任务、跟踪任务列表及各项任务优先等级数值,默认任务优先等级数值大小关系为跟踪>确认>搜索。再次执行时,根据外部控制及数据处理结果更新搜索任务、确认任务、跟踪任务列表,并更新每项任务的优先等级数值。
(4)第 i 个装备的调度模块执行任务调度。调 度模块根据调度策略、任务优先级、约束条件, 结合当前仿真时刻,完成任务调度,并给出此次调度任务的波束指向(东北天坐标系)、波形ID号、 调度时长 (t_{sch }^{i}) 。
(5) 仿真节拍更新。根据此次调度任务的时 长,设置第 i 个装备本次仿真节拍步长,即 (T_{step }^{i}=) (t_{sch }^{i}) ,并将第 i 个装备下一周期仿真起始时刻 (t_{1}=t_{0}+) (T_{step }^{1}) 回传给仿真控制模块。当探侦干一体化装备按帧调度时,即可实现基于多功能一体化装备帧调度的变步长仿真节拍设计。
2.2 区域内多装备联合时间与事件驱动时间推进机制设计
针对区域内多个装备调度时序不同带来的仿真时序设计困难,本文先通过对一体化电子装备不同工作模式下的各阶段进行独立事件划分,再引入装备仿真事件虚拟节拍的概念,提出一种联 合时间与事件驱动时间推进机制,该方法能够将多个不同调度时序的装备仿真时间线编整到统一 的系统仿真时间线中,具体实现方法如下:
(1) 独立事件划分。根据一体化电子装备各仿真模块的相关性以及便于数据存储的原则将博弈 对抗仿真系统中一体化电子装备不同工作模式下 的各阶段分为调度、信号发射、信号接收、信号处理、数据处理5个独立仿真事件。
(2) 确定每个独立事件所包含的子事件。每个独立事件的子事件均由图1 中功能组件构成,且 每个独立事件是仿真系统内所有装备该仿真事件 的集合。例如,调度事件是红蓝双方所有装备调 度模块的集合;信号发射事件由参数解析、探测 信号产生、探测信号发射、探测信号调制与存储、 干扰信号产生、干扰信号发射等子事件构成;信 号接收事件由回波信号生成、探测信号接收、侦 察信号接收、探侦信号接收等子事件构成;信号 处理事件由探测信号处理和侦收信号子事件构成;数据处理事件由探测数据处理、侦收数据 处理、融合处理子事件构成。在执行以上事件时, 会根据当前探侦干一体化装备所处的工作模式, 顺序执行事件中的若干个子事件。
(3) 装备仿真事件推进节拍和虚拟节拍设计。 针对区域内每个装备设计了2 种节拍来表征装备 仿真事件的推进情况:①装备仿真事件推进节拍, 与装备调度模块的推进节拍保持一致,该节拍决 定了第i 个装备的各独立仿真事件是否真正的执 行,其中, ({i | i in I}) ,即当仿真时间到达第 i 个装 备的装备仿真事件推进节拍时,各独立仿真事件 执行仿真;装备仿真事件虚拟节拍,对于第 i 个 装备来说,该装备的虚拟节拍是由仿真系统中其 他装备j的装备仿真事件推进节拍的并集构成,其 中, ({j | j ≠i, j in I}) ,即当仿真时间到达第 i 个装备 的装备仿真事件虚拟节拍时,该装备的各独立仿 真事件只执行是否进行仿真的判断,判断结果为 不执行仿真,从而保证了第 i 个装备仿真数据的完 整性。
(4) 仿真事件推进节拍设计。对于每个独立仿 真事件来说,其仿真事件推进节拍由仿真系统内各装备的装备仿真事件推进节拍构成。
(5) 仿真系统时间节拍设计。对于仿真系统来 说,仿真系统时间推进线是按照一定的时间节拍 依次执行调度、信号发射、信号接收、信号处理、 数据处理5 个独立仿真事件的,因此,仿真系统 时间节拍与各独立仿真事件的推进节拍保持一致。
2.3 仿真系统联合时间推进机制设计
本文提出的博弈对抗仿真系统联合时间推进 方式以基于装备帧调度的变步长时间驱动为基础, 再通过对每个仿真系统时间节拍内发生的事件进 行先判断后执行的方法,实现时间节拍的合理推 进。如图4 所示,仿真系统按照仿真系统时间节 拍推进仿真系统时间线,该节拍是所有装备仿真 事件推进节拍的并集,是仿真系统的总节拍,仿 真系统中的每个装备、每个模型的时间推进都依 赖于系统总节拍;仿真系统各仿真事件的事件推 进节拍依赖于系统总节拍,与系统总节拍同步, 也是仿真系统中所有装备某个仿真事件推进节拍 的并集;以调度模块为例,图4 中每个装备时间 线上的黄色圆点代表各装备调度模块执行的时刻, 调度模块执行一次结束后,将等到下一个黄色节 拍时才会再次执行,2个黄色节拍之间的时间间隔 取决于装备自身一帧调度时长,其他装备仿真事 件推进节拍同调度模块,不再赘述;各装备各仿 真事件在虚拟节拍处只进行判断,判断结果是不 推进仿真。
由上述可见,虽然仿真系统时间节拍(总节拍) 相比于仿真事件推进节拍将时间推进线切的更碎, 但对于每个装备的每个模块来说,只有在自己仿 真事件推进节拍到来时才执行模块仿真,在其他 节拍时刻(装备仿真事件虚拟节拍(不推进))只进行 判断,不推进仿真时间线,因此,既保证了每帧 探测信号数据的完整性,又实现了多个装备不同 模块仿真时序不紊乱、有序推进。
3 典型工作模式实现方法
探侦干多功能一体化装备的工作模式有7种: 探测工作模式、侦察工作模式、干扰工作模式、 探侦一体工作模式 、探干一体工作模式、侦干一 体工作模式、探干侦一体工作模式。本文介绍2 种典型工作模式的实现方法。
3.1 探侦一体工作模式实现方法
探侦一体工作模式实现方法如图5 所示。该 模式在信号发射事件中通过执行参数解析、探测 信号产生、探测信号发射3 个子事件实现探测信 号发射,在信号接收事件中通过执行回波生成、 探侦信号接收2 个子事件实现探测侦察同时接收。
信号发射事件 信号接收
参数解析 信号接收 主通道 主通道 信号 探侦信号接收 探测匿影信道 探测信道 探测波束
探测信号 回波 匿影波束
信道化
产生 生成 匿影通道 信号接收 匿影通道 信号 探测对消信道 侦察信道 波束 形成 对消波束 侦察波束
探测信号 发射 对消通道 信号接收 对消通道 信号 侦察匿影信道
探测发射 探测侦察同时接收
图5 探侦一体工作模式实现方法 Fig. 5 Implemention method of integrated working mode of detection and reconnaissance
信号接收模块根据控制参数中工作模式、阵 面坐标系下接收波束俯仰角、信道个数、信道带 宽、波束个数、波束类型等参数对回波信号进行信道化及波束合成,生成探测波束、侦察波束、 匿影波束、对消波束数据。接收的回波信号包括 自身探测信号的回信号 (S_{R}(t)) 、干扰信号 (J(t)) 、杂波信号 (C(t)) 、噪声信号 (N(t)) ,即 (X(t)=S_{R}(t)+J(t)+) (C(t)+N(t)^{[9]}) ,其中,干扰信号包括蓝方干扰机的 干扰信号、蓝方雷达探测信号、红方其他装备发 射信号的回波信号等。一般情况下,后两者不在 接收机频率范围内 [10],因此,为了简化计算,干 扰信号仅计算蓝方干扰机的干扰信号。
假设发射信号为
[S(t)=u(t) e^{j 2 pi f_{0} t}=A cdot rect(t / T) e^{j 2 pileft(f_{0} t+frac{1}{2} h t^{2} ight)}]
式中: A 为信号幅度; T 为脉冲宽度; (rect(t / T)) 为 矩形函数; (f_{0}) 为中心频率; k 为调频斜率, (k=B / T) B 为信号带宽; (u(t)) 为信号的复包络, (u(t)=)
[A cdot rect(t / T) exp left(j pi k t^{2} ight) 。]
设探测目标为点目标模型,且目标距离为 (R_{m}) ,多普勒频率为 (f_{d}) ,雷达散射截面积为 σ ,天线 增益为 G 。则目标回波为
[�egin{aligned} S_{R}(t)= & A_{0} cdot rectleft(frac{t-2 R_{m} / c}{T} ight) exp left(j 2 pileft(f_{0}+f_{d} ight) t cdots+ ight. & left.left.frac{1}{2} kleft(t-2 R_{m} / c ight)^{2} ight) ight) end{aligned}]
[A_{0}=left[frac{G^{2} lambda^{2}}{(4 pi)^{3} R_{m}^{4}} ight]^{1 / 2} sigma]
干扰信号以假目标干扰为例, N 个干扰机的 干扰信号之和为
[J(t)=sum_{k=1}^{N} A_{k} Sleft(t-2 R_{k} / c ight)]
在后续信号处理和数据处理事件中,通过同 时执行探测和侦察的相关处理,完成探侦信号信 息处理。
偏频信道化脉压实现步骤如下:
(1) 对发射的中频信号进行移频操作。将发射 的中频信号载频 (f_{H}) 移到该频点所在信道的低频频 点 (f_{ch}^{L}) 上,其中, (0
(2) 根据信道化抽取倍数 K 对移频后的中频信 号进行降采样。降采样后中频信号为 (Y(t)=) (S_{1}(K t)=s(K t) e^{-j 2 pi(f_{0}-f_{n}+f_{ch}^{2}) K t},)
(3) 将降采样后的中频信号 (y(t)) 与接收信号进 行脉冲压缩。
3.2 侦干一体工作模式实现方法
装备在侦干一体工作模式下可以在侦察蓝方 信号的同时实施噪声压制、密集假目标、切片转 发等干扰。其中,实施噪声压制干扰时,不需要 对蓝方探测信号进行取样,但由于有源压制干扰 通常不够隐蔽,不利于一体化装备的战场生存 [11]。
如图6 所示,该工作模式下先进入无源侦察 阶段,装备仿真执行调度、信号接收、信号梳理、 数据处理4 个事件。数据处理事件除了完成无源 批次管理,还要进行威胁等级判断、干扰决策, 确定后续干扰目标、干扰参数。在干 扰阶段装备仿真执行调度、信号发射2 个事件。 信号发射事件通过执行参数解析、探测信号调制 与存储、干扰信号产生、干扰信号发射4 个子事 件实现干扰信号发射。在取样窗阶段,通过干扰 指向获取、对蓝方探测信号进行干扰接收方向图 调制、叠加单程路径损耗等步骤完成对蓝方探测 信号的调制与存储。
侦察阶段 干扰阶段 侦察阶段 干扰阶段
取 取
样干扰窗样干扰窗样干扰窗
reconnaissance and jamming Fig. 6 Implemention method of integrated working mode of
4 仿真系统应用实例
4.1 场景想定及仿真设置
仿真实验场景假设如下:红蓝双方在一定区 域内各自部署了3 套探侦干一体化装备进行博弈 对抗,各装备的初始仿真参数如表1 所示。在仿 真开始前,先通过图7 装备参数设置界面对各装 备的工作模式、工作参数进行想定,然后通过图7 中的“处理流程设计”按钮对装备的处理流程进 行设计。
表1 各装备初始仿真参数 Initial simulation parameters of each equipment Table 1
| 装备序号 | 工作模式 | 变频带宽 /MHz | 方位覆盖范围 /(°) | 干扰类型 | 干扰占空比 /% | 干扰对象 |
| 红方 1 | 探测 | 210 | ±180 | - | - | - |
| 红方 2 | 探侦一体 | 20 | ±45 | - | - | - |
| 红方 3 | 侦干一体 | 500 | ±45 | 切片转发 | 50 | 蓝方 2 |
| 蓝方 1 | 侦察 | 500 | ±45 | - | - | - |
| 蓝方 2 | 探侦一体 | 20 | ±45 | - | - | - |
| 蓝方 3 | 侦干一体 | 500 | ±45 | 密集假目标 | 50 | 红方 1 |
在仿真过程中,仍可通过人机交互界面实时 更改装备的工作模式、工作参数及处理流程。在 本案例中,按照表2将红方装备3的工作模式由侦 干一体转为探干一体,将蓝方装备1 的工作模式 由侦察模式转为侦干一体模式。仿真过程中也可 以通过图7 中的“处理流程设计”按钮增加抗干 扰功能。
表2 各装备变更后仿真参数 Table 2 Changed simulation parameters of each equipment
| 装备序号 | 工作模式 | 变频带宽 /MHz | 方位覆盖范围 /(°) | 干扰类型 | 干扰占空比 /% | 干扰对象 |
| 红方 3 | 探干一体 | 210 | ±45 | 探干一体波形 | 50 | 蓝方 2 |
| 蓝方 1 | 侦干一体 | 500 | ±45 | 切片转发 | 75 | 红方 2 |
4.2 仿真系统时间推进案例
完成仿真设置后,结合该仿真实例对仿真系 统“基于帧调度的变步长时间推进”与“独立事 件驱动的时间推进”方式以及其中所涉及到的4 种仿真节拍进行说明与验证。
仿真系统按照仿真系统时间节拍 TimeStepVector 来推进仿真,当前节拍时间 TimeTemp 为TimeStepVector 中的第一个节拍。总节拍是所有装备某个仿真事件推进节拍的集合, 再按照从小到大的顺序排列。
在各仿真事件中首先执行调度仿真事件。每 个装备的装备仿真事件推进节拍由各装备的调度 事件产生,调度事件依据自身的仿真事件推进节 拍SchedTimeline 是否为空来决定是否产生新的节 拍,节拍持续时长为该装备即将仿真的当前帧的 帧时长,从而保证了总节拍由各个装备的帧时长 决定。
在执行完调度仿真事件,且完成总节拍推进、 当前节拍时间推进后,后续按顺序执行信号发射、 信号接收、信号处理、数据处理各事件仿真,每 个仿真事件的执行条件由当前节拍时间TimeTemp 与各仿真事件中每个装备的装备仿真事件推进节 拍SchedTimeline 的大小决定。最后再对 SchedTimeline 和TimeStepVector 进行更新,即完成 了一个节拍的仿真。
在仿真过程中,可设置结构体变量来记录装 备仿真事件推进节拍、总节拍、节拍号、当前节 拍时间、上一节拍截止时间、本节拍持续时长等 信息。在本案例中,如图8 所示,第B~G 列为上 述仿真场景中红蓝双方共6 个装备的调度仿真事 件产生的仿真事件推进节拍;对其取并集再排序 得到H 列,表示总节拍;I 列为H 列的第一个数, 为当前节拍的截止时刻。仿真起始时,所有装备 的SchedTimeline 均为空,所有装备的调度事件均 产生新的节拍,如图8所示,红方装备1的第一帧 时长为12.292 ms,红方装备2 的第一帧时长为 12.446 ms(新节拍用红色字体表示)。由于每个装 备的每一帧时长均是由其调度仿真事件确定的, 且不同装备之间相同帧号时长不同,相同装备不 同帧号时长亦不同,因此,整个仿真系统是变步 长的,即实现了“基于帧调度的变步长时间推 进”。由于每个装备的每一帧时长是确定的,因 此,克服了固定时间步长难以确定的问题。
在信号产生仿真事件中,用 TimeTxed记录每个装备在本节拍开始前已经产生 的信号总时长。事实上,TimeTxed等于上一节拍 的SchedTimeline。通过判断TimeTemp 与 TimeTxed 的大小来决定是否执行信号产生事件。 如图8中I~K列所示,当某个装备的TimeTxed小于 当前节拍时间TimeTemp时,说明该节拍时该装备 需要执行信号产生事件,即当前节拍为该装备的装 备仿真事件推进节拍(黄色节拍),否则,该节拍是 装备仿真事件虚拟节拍(灰色节拍),不执行仿真。 由于对每个装备来说,只在本装备的黄色节拍执行 信号产生事件,因此,并不会由于总节拍导致每帧 探测数据被切断,相比用总节拍推进仿真再对仿真 数据进行拼接的方式,减小了仿真开销。图9为红 方装备1、红方装备2在第1~3帧的探测发射数据, 可以看出,每帧探测数据都是完整的,即通过“独 立事件驱动的时间推进”设计保证了每个装备每帧 探测仿真数据的完整性。
同理,信号接收、信号处理、数据处理仿真 事件的执行条件相似,均为判断当前TimeTemp是 否等于每个装备的SchedTimeline。如果是,执行 仿真,即当前节拍为该装备的装备仿真事件推进节拍(黄色节拍),否则,该节拍是装备仿真事件虚 拟节拍(灰色节拍)。
将当前节拍时间TimeTemp 从该装备的 SchedTimeline 中删除,完成SchedTimeline 的更 新。将TimeTemp 从TimeStepVector 中删除,完成 TimeStepVector的更新。
4.3 仿真结果及分析
依据上述的仿真流程和想定,运行仿真系统 实现红蓝双方的博弈。在对抗的各阶段,可 以选取“脉冲压缩”和“CFAR检测”等关键节点 观察装备探测情况,选取“脉宽”“脉冲重复周 期”“载频”“方位”等参数来观察装备侦察情况。
(1) 初始状态下,红蓝双方侦干一体装备处于 侦察阶段,红蓝双方探测装备正常探测。红方装备 1探测结果如图10所示,由仿真结果可见,红方装 备1探测正常。蓝方装备1侦察结果如图11所示, 由仿真结果可见,蓝方侦察到红方有2个辐射源, 图中不同颜色代表在不同推进节拍接收到的信号的 侦察结果,图11为3个节拍的侦察结果。
(2) 蓝方经干扰决策,蓝方装备1 切换至侦察 干扰模式,对红方装备1实施干扰,蓝方装备3对 红方装备3实施干扰。此时红方探测装备受干扰。 红方装备1 探测结果如图12 所示,由仿真结果可 见,红方装备1被干扰,出现大量虚假目标。
(3) 红方装备3在侦干模式下对蓝方装备1实施 连续波干扰,降低红方装备1受干扰概率,红方装备3切换至探干一体,进一步提升红方探测性能。蓝方干扰机接收到的叠加信号如图13(a)所示,切片转发信号如图13(b)所示,可见,蓝方干扰机在多数时间内切片转 发了红方装备3的连续波干扰信号。红方装备1探 测结果如图14所示,由仿真结果可见,红方装备1 恢复探测能力,但仍然出现少量虚假点迹。
5 结论
本文给出了一种支持区域内多个多功能一体 化电子装备开展信号级博弈对抗的仿真系统实现 方法,以区域内多个多功能一体化装备分布式协 同对抗为主要研究对象,构建红蓝双方博弈对抗 场景,模拟双方动态博弈对抗过程,复现对抗中 多个装备工作模式及装备信号样式。结合单装内 部、多装之间2 个层面提出了联合时间与事件驱 动的仿真系统时间推进方法,能够实现不同工作 模式、不同调度时序的多个探侦干多功能一体化 装备的信号级博弈对抗,极大程度地提高了仿真 的灵活度,在保证了每帧探测仿真数据的完整性、 减少数据拼接开销的同时,又能实现系统内多个 装备按照自身的时序同时有序推进。仿真结果表 明:该系统能够为多功能一体化装备作战应用方 式研究提供理论依据和实验平台支撑。
参考文献
[1] 朱伟强, 王克让, 许华健, 等. 多功能综合一体化技术发 展综述[J]. 航天电子对抗, 2020, 36(3): 1-10.
[2] 刘瑜, 谢强. 数字孪生的技术特点及在飞行试验中的应 用展望[J]. 系统仿真学报, 2021, 33(6): 1364-1373.
[3] 邱志明, 李恒, 周玉芳, 等. 模拟仿真技术及其在训练领 域的应用综述[J]. 系统仿真学报, 2023, 35(6): 1131-1143.
[4] 牟升. 多功能相控阵雷达的数字仿真研究[D]. 南京: 南京理工大学, 2019.
[5] 毕大平, 祝本玉. 雷达电子战仿真系统设计[J]. 信息与电子工程, 2010, 8(4): 393-396, 406.
[6] 雷璐, 郝世林, 高恒, 等. 雷达功能与侦察仿真系统终端 设计[J]. 信息与电脑, 2016(5): 99-100.
[7] 郑娟. 基于HLA作战模拟系统的时间管理研究[J]. 装备指挥技术学院学报, 2005, 16(3): 26-30.
[8] 杨光. 基于面向对象的电子战仿真系统设计与实现 [D]. 西安: 西安电子科技大学, 2018.
[9] 马辉, 孙健, 刘正堂, 等. 雷达对抗数字仿真系统设计研 究[J]. 航天电子对抗, 2019, 35(1): 16-18, 35.
[10] 杜富强. 电子对抗与反对抗策略研究[D]. 西安: 西安电子科技大学, 2017.
[11] 贵彦乔, 吴彦鸿, 俞道滨. 跟踪雷达干扰技术综述[J]. 兵器装备工程学报, 2017, 38(4): 141-147.



