�����й��غ���ʽ��ֳ��ʩ�ܼ����̨���Ӱ�첻���ڶ��̶�ϵ�������õ���ϵ����ʽ��������λ��ȫ����Դ�����ֳ��ʩ���õ���ϵ��ϵͳ��Ϊϵ��װ�ã��ܹ��ܺõ���Ӧ���ӻ���������ʹ��AQWA(Advanced Quantitative Wave Analysis)��������ˮ�������ܵ���ֵ�����������Ǹ���ͷ��θ���ͬ����Ƕ��µķ�ֵ��Ӧ����(Response Amplitude Operator, RAOs)�����������һ�ײ���������Ƶ����㣬�Լ�����ˮ����ʱ����㡣������ͬ���������������ֳ��ʩ���˶���Ӧ��ϵ������Ӧ����������ҵ������ʩ����λ��ȫ�ԡ�
�����ؼ��ʣ�ˮ����;������ֳ��ʩ;����;��Ӧ
�������ġ�����ϵ��������ֳ��ʩ��ˮ���������о��������ڡ�������ѧ��������Ȩ�顶������ѧ�������С�������������ƽ̨�������ο���
�������ڸ��ֺ��ʲ�Ʒ�Ĺ�Ӧȱ�ڵ�2030��Ԥ�ƴﵽ200���[1]�����и߶˺��ʲ�Ʒռ�Ƚ���һ�������г�ǰ��������������ֳ�ܵ�������Ӱ�����ֳ�ܶȸߣ���ֳ��Ʒ��Ʒ�ʲ����������ں����г����������Ķ������������Ʒ�ʵ�Ҫ�����Ų�����Դ����˥�ˣ����̳ɱ�������������ֳ��ҵ��ԴΪ����Ϊ������ҵ��չ��Ȼ����ֳ������dzˮ������ˮ����Զ����������չ[2]��
������Զ��������ֳ�����ƺ��ص�Ҳע������ֳҵ���չ�ıؾ�֮·������ֳ����ṹ����ˮ�������Է���������������Զ����ֳϵͳ����ֳװ���Ĵ��ͻ���չ[3]�������������ڸ�������Ͷ��߷��յ���Ŀ����Ҫ��Ӧ������������������º���ֳװ���İ�װʹ�ã������Ҫ����ƽξ�������ϸ���ܵĿ��ǣ�ȷ����Ŀ��ȫ���С�
����Ų��ѧ��SHAINEE M��[4-5]�������ˮ��ֳ����ṹ��Ƶĸ����ܺ��밶��ʽ����Ľṹ������������Щ���������һ�ֲ��õ�êϵ��(Single Point Mooring, SPM)��ȫ�����Զ����ʽ���䡣CIFUENTES C��[6]ʹ��Morisonģ�ͷ�����������ֳ����ϵͳ�ڲ��˺�ˮ�������µ�ˮ������Ӧ��ͨ�������о��ó�ˮ���ٶ���ṹϵ����֮������ϵ��MARLEN S I��[7]��һ�ַ��ʽ����Զ����ֳ�����������Ԫ��ģ����ϸ����ˮ�������Ľṹ��ק������������ṹ�α�֮������ϵ���о�Ѱ���µ�ϵ����ʽ����������ʹ�óɱ��ķ�����KIM T��[8]�����һ�����͵ı����밶��ֳ���䣬ͨ��������ֵģ�⣬����Ư������DZ���ֹ���״̬�½��и���ʽ����Ĺ��̷������о�ʵʩ�Ŀ����ԡ���������[9]��һ�ֵ�êϵ�����������������ģ�����飬�о���ͬ���ܿ�ܡ���ͬ�����ͬ������ʽ��������������Ӱ�졣
�������ĶԼƻ���װ�ڻƺ���ˮ�ź���ĸ��ʵ���ϵ��������ֳ��ʩ“����”�Ž���ˮ���������о��������ṹ���˶���Ӧ��Ϊ��������Զ����ֳװ����ϵ���밲ȫ�����ṩ�о�˼·��
����1 �����
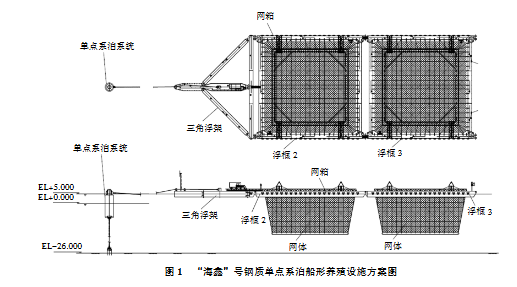
����“����”���������������ˮ��������������������İ�Ұ������ֳ�������ƣ���������ص���õ���ϵ����ʽ����Ҫ�ɵ���ϵ��ϵͳ�ʹ��θ���������������ɡ�������ֳ��ʩ��Ϊ2����ֳ���壬�ṹ�ͳ�216.75 m���Ϳ�53.95 m�����帡��߶�3 m������ϵ��ϵͳ����������ϵ��������Ͳ��ϵ���¼�����ת�����Ӽ���ɡ��������ȷ���ĸ��ʵ���ϵ��������ֳ��ʩ����������ͼ1��ͼ2��ʾ��
����ͼ1 “����”�Ÿ��ʵ���ϵ��������ֳ��ʩ����ͼ
����ͼ2 ��ʩ���Ч��ͼ
����������ֳ��ʩ���ڲ�����ϵĻ����У����ڵ���ϵ�����ص��˶������������غ������µ���϶���ʩӰ�������ˣ�����ʱѡ�˹���������
����2 ˮ������������
��������“����”�Ÿ��ʵ���ϵ��������ֳ��ʩ���ͼֽ����ȫ�̶ֹ�����ϵ�½�����ֳ��ʩ�͵���ϵ��ϵͳ�ļ���ģ�͡�������ֳ��ʩ��3��ģ����������½����ӣ���˽�����ֳ��ʩģ��ʱ��3����������3�������ĸ��壬��ʩϵͳ����ģ����ͼ3��ʾ��
����������AQWA��������ˮ��������ʱ�����־���Ϊ1.2 m������ָ����ˮ���1.5 m��ˮ������ģ��ͼ4��ʾ��
����ͼ3 ����ģ��ͼ
����ͼ4 ˮ����ģ��ͼ
����2.1 ��������
����������ֵģ���������������˵�����/�������ۣ��������ۼٶ�����Ϊ�ܶȾ��ȡ���𤡢����ѹ�������������ٶ����ٶ��ƵĹ�ϵ�ɱ�ʾ���£�
����[q(x, y, z, t)=Releft{u(x, y, z) e^{-iomega t}
ight}]
����[F(x, y, z, t)=f(x, y, z) e^{-iomega t}]
����ʽ�У�(u(x, y, z)=
abla phi(x, y, z));(omega)Ϊ������Ƶ��;qΪ�ٶȡ�
�������˳��ٶ��Ƶ����������Խ��б�Ҫ��ͨ���������Ӧ����߽�������������˹���̣�����ɵõ��ٶ��ƶ��⡣ģ�͵�������˹�������£�
����[
abla^{2} phi(x, y, z)=0]
�������Ի������ɱ����ʽ(4)��
����[frac{partial phi_{j}^{R}}{partial n}-frac{omega^{2}}{g} phi_{j}^{R}=0]
��������������ʽ(5)��
����[left.frac{partial phi_{j}^{R}}{partial n}
ight|_{S}=n_{j}]
��������������ʽ(6)��
����[left.frac{partial phi_{j}^{R}}{partial n}
ight|_{z=-H}=0]
��������Զ����ʽ(7)��
����[lim _{R o infty} sqrt{R}left(frac{partial Phi}{partial R}-i k Phi
ight)=0]
����ʽ�У�(n_{j})Ϊ��������ⷨ������(j=1,2,cdots,6);(R=sqrt{x^{2}+y^{2}});HΪˮ�
����“����”����ֳ��ʩϵ��ϵͳ���Ϊ����ϵ��ϵͳ�����ڵ���ϵ��ϵͳ��������û���˲��ٶ��ƣ���ˣ�������ܵ��ٶ��ƾ��Dz������ơ������Է��������У��������Ե��ӵ�ԭ���������ٶ��ƿ��Էֽ�Ϊ�����䲨�ٶ���(Phi_{I})��������(Phi_{D})�ͷ�����(Phi_{R})��
����[
����Phi (x, y, z, t)=Phi _{I}(x, y, z, t)+Phi_{D}(x, y, z, t)+Phi_{R}(x, y, z, t)
����]
����ʽ�У�������Ϊ���䲨�������Ĺ��ף������Ʊ�������Ĵ��ڶ������Ŷ��Ĺ��ף����������ʾ������˶���������Ӱ�죬������������Ƶĺ��ֳ�Ϊ�Ŷ��ơ�
����������������ƾ������Ƶı߽�����������������������(left.frac{partial phi^{D}}{partial n}
ight|_{S}=-left.frac{partial phi^{I}}{partial n}
ight|_{S});����������������(left.frac{partial phi_{j}^{R}}{partial n}
ight|_{S}=n_{j})��ͨ�����������������ƣ������ڵ��ƺ�����ȷ����
����2.2 һ�ײ��������
����������õ��ٶ��ƺ������������Ի��IJ�Ŭ������(p^{(I)}=-
holeft(frac{partial Phi^{(I)}}{partial t}+g z
ight))���ˮ��ѹ���ֲ�����“����”����ֳ��ʩ��������ܵIJ�ѹ�����л��ַ������㣬�ɵõ�6��������˶�ģ̬�������ܵ��������أ�
����[f_{i}=int_{S} p n_{i} d S, i=1,2,3]
����[M_{i}=int_{S} p r imes n_{i} d S, i=4,5,6]
��������õ��������ش��뵽��Ŭ�������пɵ�ʽ(11)��
����[f_{i}=int_{S}left(-
ho frac{partial Phi^{(I)}}{partial t}-
ho g z
ight) n_{i} d S]
�������ٶ��ƺ����ı���ʽ(8)���룬�����˵Ķ�ѹ���ֿɷ�Ϊ3�����֣�
����[f_{w}=f_{w}^{I}+f_{w}^{D}+f_{w}^{R}]
����2.3 Ƶ���˶�����
��������ţ�ٵڶ����ɣ�������ֳ��ʩ���˶��������£�
����[m_{ij} ddot{x}_{j}=f_{j}]
����ʽ�У�(f_{j})����һ�ײ��˼��������������;�ˮ�ָ����ȣ�������������ʾΪ�����������������ı���ʽ��������ֳ��ʩ��Ƶ���µ�һ���˶��������£�
����[left(m_{ij}+u_{ij}
ight) ddot{x}_{j}+lambda_{ij} dot{x}_{j}+c_{ij} x_{j}=f_{j}, i, j=1,2,cdots,6]
����ʽ�У�mΪƽ̨����;uΪƽ̨�����˶�ģ̬��������;λΪ��������ϵ��;cΪ��ˮ�ظ���;fΪһ�ײ���������ʽ�еĸ����������ؾ�ͨ��ǰ�����ٶ�����������Ѿ������Ƶ���µ�ˮ������������˿����õ���ֳ��ʩ��Ƶ���µ�λ�������䲨�������ɶȷ�����˶���Ӧ��
����2.4 ʱ����㷽��
�������ݿ���˹����[10]����ά�������ۣ�����Ƶ���µ�ƽ̨ˮ������Ӧ��ֵ���Ӽ��㣬Ȼ��ͨ��Ƶ��תʱ��ļ��㷽��������ʱ��ģ�������˶����̣�ͬʱ��������IJ��˺��ء���������ģ��ָ����������ʩ���˶���
����2.4.1 ������
����ʱ������У�“����”����ֳ��ʩ����������ק��ϵ������ʽ(15)���м��㣺
����[F=frac{1}{2}
ho C_{d} A v^{2}]
����ʽ�У�ρΪ�����ܶ�;(C_{d})Ϊ�ٶ���ϵ��;AΪƽ̨��ˮ����ͶӰ���;vΪ���٣����շֲ�����������������0.83 m/s���в�����0.65 m/s���ײ�����0.53 m/s��
������AQWA����������ϵ���������ػ�����������ƽ���ı�ֵ������ǰ�����㹫ʽ������ϵ����ȷ��Ϊ(frac{1}{2}
ho C_{d} A)��������ֵ����ģ����������ÿ45°Ϊһ�������Բ�ܷ�λ��������8�������µIJ�ͬ�����أ��Ӷ����Բ�ܸ��������µ�����ϵ���������������������ϵ��������Բ��8����ֵ�Բ�ֵ������Եõ���
����2.4.2 �����غ�
����ʱ������в��˺��ز���JONSWAP�ף��������˲������1��ʾ��
������1 �������˲�����
����|����|��Ŀ|��ֵ|
����| ---- | ---- | ---- |
����|����(JONSWAP��)|���岨��|3.77 m|
����||������|8.97 s|
����||��ֵ��������|3.3|
����2.4.3 ���º���
�������С�߶����½ṹ�����ü�������ģ��[11]���������µ���������Ρ�����ţ�ٵڶ����ɣ����¼�����������˶��������£�
����[m_{N} ddot{x}_{N}=T_{N}+W_{N}+B_{N}+F_{N D}+F_{N I}]
����ʽ�У�(m_{N})Ϊ���µ�����;(ddot{x}_{N})Ϊ������������ٶ�;(W_{N}=m_{N} g)Ϊ������������;(B_{N}=-
ho g forall_{N})Ϊ�������ܸ���;(forall_{N})Ϊ��������������;(F_{N D})��(F_{N I})�ֱ�Ϊ�����������ϵ��ٶ���������������ͨ��Ī��ɭ���̼��㣺
����[F_{N D}=frac{1}{2}
ho C_{D} A_{N}left(u-u_{N}
ight)left|u-u_{N}
ight|]
����[F_{N I}=
ho C_{M} forall_{N} frac{partialleft(u-u_{N}
ight)}{partial t}]
����ʽ�У�(C_{D})������ϵ��;(C_{M})�ǹ�����ϵ��;(A_{N})��ͶӰ���;u��(u_{N})�ֱ�Ϊ����ˮ�ʵ��ٶȺ˼��ṹ�ٶȡ�
����Ϊ�����Ч�ʣ���ֵģ������в�������ĿȺ���ķ��������½���ģ�⣬�����С��Ŀ�ϲ���һ���ϴ����Ŀ�������ı����µ��������ʣ�Ⱥ�����������ʵ�ʵ����¾�����ͬ��ӭ�������������
����2.4.4 ʱ���������ͳ�Ʒ���
�����ڽ��в�����ʱ��������ǰ������ͨ��Libruimƽ���������[12]���õ�“����”����ֳ��ʩ��ƽ��λ�ã�������ֳ��ʩ�ں������������µ�ƽ��λ�ú���ֳ��ʩ����ǡ�����AQWA����õ�����ֳ��ʩ�˶�ʱ�������������ݣ������趨����X��Y��Z��RZΪȫ������ϵ��RX��RYΪ�洬����ϵ������X��Y��������ݣ�������Ҫͨ������ת���õ���ֳ��ʩ����������ϵ���ݵ����ᵴ������˶����꣬��ͳ�Ƶõ���ʩʵ�ʵ��ݵ��ᵴ�˶���������ת����ʽ���£�
����[left{�egin{array}{l} x'=x cos heta+y sin heta \ y'=-x sin heta+y cos heta end{array}
ight.]
����ʽ�У�(x, y)Ϊȫ������ϵ����ֳ��ʩ����λ��;(x', y')Ϊ����ֳ��ʩ����ϵ����ֳ��ʩ����λ��;θΪ��ֳ��ʩ����ǣ�����ʱ��Ϊ����
����������ֵ����õ���“����”����ֳ��ʩ�˶���ϵ����ʱ���������ߣ������Ͽ���㷨���з�����Ϊ�ų����ݷ���żȻ����Ӱ�죬���ļ���������ò��ߵ�����ֵ���С�
����3 ˮ����������
����������ά�������۵ļ��㷽��������ANSYS AQWA������Ƶ���ڼ��㴬����ֳ��ʩ��ָ����ˮ�µ�ˮ���������������丽���������������ἰRAOs�ȡ�ͬʱ������ͬ�����²�ͬƵ���µ�һ�ײ�����������ƽ���������Ͷ��δ��ݺ�����Ϊ֮��ָ�������µIJ������˵���ֳ��ʩ��ˮ����ʱ����Ӧ�����ṩ���ݡ�
����3.1 ˮ������Ƶ�����
�������ݽ�����ˮ����ģ�ͣ�����0°~180°�������������ṹ��ˮ���Ϊ1.5 m����ʱ��ֳ��ʩ��ˮ�������ԡ����Ƿ����ļ�ֵ�����ԣ�ѡ��������н�Ϊ0°��30°��60°��90°����4�������£�����ֳ��ʩ�����ɶ��˶�ģ̬���м��㡣
������ֳ��ʩ��ƽ̨�ṹ������½ӵ����ӣ��ͳ��ߴ��������Ϳ��������ֳ��ʩ�Ľṹ�ᵴ����ҡ����ҡΪ���С�������սṹ�ص���Ҫ����ֳ��ʩ���ݵ�����������ҡ3�����ɶ��˶�������з�����ͨ����������õ���ͼ5��ʾ�ṹ�ķ�ֵ��Ӧ����(RAOs)�����Ǹ���ͷ��θ�����Ӧ������ͬ��
����ͼ5 �ݵ�RAOs
�������ݵ���ֵ��Ӧ���Ӽ�����ͼ�ĶԱȿɷ��֣����θ�����4�ֲ�ͬ��������Ƕ��������ݵ��˶���Ӧ���������Ǹ������ƣ��������Ϊ0°��30°��60°����£����Ǹ����ݵ��˶���Ӧ������Ƶ�ʵ����Ӵ���ȼ�С����������Ƕ�Ϊ90°ʱ���Ǹ����ˮƽ�����˶���Ӧ��С���ݵ��˶��沨Ƶ�����������Ӻ��С��
���������Ǹ����˶���Ӧ���ƣ���ͼ6��ʾ��4�ֲ������������£�“����”����ֳ��ʩ�ķ��θ���Ĵ�����Ӧ����Ƶ�ʵ����Ӷ���С���ڸ�Ƶ�������С�ķ�ֵ��
����ͼ6 ���θ���RAOs
����“����”����ֳ��ʩ���θ������ҡ�˶���Ӧ�����Ǹ���������ƣ�4�ֲ�������Ƕ�����£���ͼ7��ʾ��ֳ��ʩ������ҡ�νǶȾ��沨Ƶ�����Ӷ����ӣ������ֵ����С���ڸ�Ƶ������������ֵ��
����ͼ7 ���θ�����ҡRAOs
���������Ǹ���������ƣ���ֳ��ʩ���θ���6���˶����ɶ��µķ����������Ų�Ƶ�ı仯���ɻ�����ͬ�����沨Ƶ�����ӣ�����ϵ����������ͼ8��ʾ������ﵽ��ֵ����С���������㡣
����ͼ8 ���θ�������ɶȷ�������
������ͼ9��ʾ����4�ֲ�ͬ����Ƕ�����£����Ǹ���ͷ��θ�����ݵ�һ�ײ�����Ƶ��仯�������ƣ�������Ƶ�ʵ���������������С�����ƣ��ڸ�Ƶʱ�����㡣
����ͼ9 ���Ǹ����ݵ�һ�ײ�����
������4�ֲ�ͬ����Ƕ�����£����Ǹ���ͷ��θ���Ĵ���һ�ײ�����Ƶ��仯�������ƣ���ͼ10��ʾ��������Ƶ�ʵ����������Եļ�С���ƣ��ڸ�Ƶʱ�����㡣
����ͼ10 ���Ǹ���һ�ײ�����
������ͼ11��ʾ����4�ֲ�ͬ����Ƕ�����£����Ǹ���ͷ��θ������ҡһ�ײ���������Ƶ��仯�������ƣ�������Ƶ�ʵ���������������С�����ƣ��ڸ�Ƶʱ�����㡣���Ų�������Ƕ�Խ����90°����ҡһ�ײ������ز�����С������Խ���ԡ�
����ͼ11 ���Ǹ�����ҡһ�ײ�������
����3.2 ˮ����ʱ�����
��������ˮ����ģ�ͣ�����“����”�Ÿ��ʵ���ϵ��������ֳ��ʩ�ڲ���������������ֵģ�ͣ������������ز������2��ʾ������������3��ʾ��
������2 ��������������
����|����|��Ŀ|��ֵ|
����|��(�ֲ���)|��������/(m·s⁻¹)|0.83|
����||�в�����/(m·s⁻¹)|0.65|
����||�ײ�����/(m·s⁻¹)|0.53|
������3 ������ϱ�
����|�������|��������|�������������/(°)|
����|1|0°����0°����|��0����0|
����|2|0°����30°����|��30����0|
����|3|0°����60°����|��60����0|
����|4|0°����90°����|��90����0|
�����ֱ���㲻ͬ��������Ƕȹ�������ֳ��ʩ���˶���Ӧ��ͳ������ֵ��ƽ��ֵ�����ֵ������ͷ���������¡�
����3.2.1 0°��������
����0°ˮ����0°����ͬ�������������ֳ��ʩ���˶���Ӧͳ�ƽ����ͼ12��ͼ14��ʾ��
����ͼ12 0°����������ֳ��ʩ�˶���Ӧ����ֵ
����ͼ13 0°����������ֳ��ʩ�˶���Ӧƽ��ֵ
����ͼ14 0°����������ֳ��ʩ�˶���Ӧ���ֵ
��������ͼ12��ͼ14��֪����3������֮���˶���Ӧ�Աȡ�������ֳ��ʩ3������֮��ͨ�����������������֮����ڸ������ת���������ƽ������3��������ݵ��ͺᵴ��ֵ��ȫһ��;3�����������˷�����ǰ������ֵ���μ�С;���ڲ�����ˮ��ͬ���Ϊ0°��3������ĺ�ҡ��ֵ��Ϊ���Сֵ;���Ǹ�����ҡ��ֵ���Դ��ں����������;3���������ҡֵ�dz��ӽ�����6�������˶���Ӧ�Աȡ�������ͬ����Ϊ0°ʱ��ƽ̨��6�����ɶ��˶���Ӧ��Ҫ��ӳΪ�ݵ�����ҡ����ҡ�˶������ݵ��˶���ֵ���Դ����������ɶ��˶���ֵ�����ᵴ�������ͺ�ҡ����Ӧ�������Ժ��ԡ�
����0°ˮ���벨����������ֵ������������ֵͳ�ƽ������4��
������4 0°ˮ���벨����������ֵ�����˶���Ӧ����ֵ
����|����|�ݵ�|�ᵴ|����|��ҡ|��ҡ|��ҡ|
����|���Ǹ���|12.54|3.05|0.86|0.07|3.29|1.87|
����|����2|12.54|3.05|0.52|0.07|1.64|1.87|
����|����3|12.54|3.05|0.40|0.07|1.60|1.87|
����3.2.2 90°��������
����0°ˮ����90°���������������ֳ��ʩ���˶���Ӧͳ�ƽ����ͼ15��ͼ17��ʾ��
����ͼ15 90°����������ֳ��ʩ�˶���Ӧ����ֵ
����ͼ16 90°����������ֳ��ʩ�˶���Ӧƽ��ֵ
����ͼ17 90°����������ֳ��ʩ�˶���Ӧ���ֵ
��������ͼ15��ͼ17��֪����3������֮���˶���Ӧ�Աȡ�3��������ݵ��ͺᵴ��ֵ��ȫһ��;�������棬3�����������˷�����ǰ�����ֵ���μ�С;3������ĺ�ҡ��ֵ��Ϊ���Сֵ;��ҡ���棬���Ǹ�����ҡ��ֵ���Դ��ں����������;3���������ҡֵ�dz��ӽ��������������˶���Ӧ�Աȡ���0°ˮ����90°�IJ������������£���ʩ��6�����ɶ��˶���Ӧ��Ҫ��ӳΪ�ݵ����ᵴ����ҡ����ҡ�˶����ᵴ�˶���ֵ��ƽ��ֵ�����ֵ�Ѿ������ݵ���ֵ���������ͺ�ҡ����Ӧ�������Ժ��ԡ�����0°~60°������������˶���Ӧ��ȣ�90°�ĺ��˴�����Ϊ���Ե�ƽ̨�ᵴ�˶���Ӧ��3������ĺᵴ��ֵ�����ִ�����ӣ��ᵴ�˶���ƽ��ֵ�����ֵ�Ѿ������ݵ��˶���ֵ;��ҡ���棬90°�����������ʱ��ҡ��ֵΪ��������Ƕ���������
����0°ˮ����90°������������ֵ������������ֵͳ�ƽ������5��
������5 0°ˮ����90°������������ֵ�����˶���Ӧ����ֵ
����|����|�ݵ�|�ᵴ|����|��ҡ|��ҡ|��ҡ|
����|���Ǹ���|9.00|13.00|1.39|0.17|4.47|5.31|
����|����2|9.00|13.00|0.95|0.17|2.62|5.31|
����|����3|9.00|13.00|0.65|0.17|2.80|5.31|
����3.3 ��ֳ��ʩϵ����������
����ͨ���ֱ���㲻ͬ��������Ƕȹ�����“����”�Ÿ��ʵ���ϵ��������ֳ��ʩ���Ǹ���ϵ���㴦��ϵ������ͳ������ֵ��ƽ��ֵ�����ֵ����ͬ��������Ƕ�����¼���ͷ�������Ա���ͼ18��ͼ20��ʾ��
����ͼ18 ��ͬ��������Ƕ�ϵ������������ֵ
����ͼ19 ��ͬ��������Ƕ�ϵ��������ƽ��ֵ
����ͼ20 ��ͬ��������Ƕ�ϵ�����������ֵ
��������ͼ18��ͼ20��֪��0°���˺�ˮ������ʱ��ϵ����X��������Դ���Y��Z����������Ų�������Ƕ���90°ת�䣬Y��ϵ��������������90°��������ʱY��ϵ�������������ֵ�Ѿ�����X������������һ����ֳ��ʩ�˶���Ӧ�����������˵��б�˵����ø���ֳ��ʩ���������Եĺ����˶��Ͷ�����Ӧ�����ֲ�������Ƕ����ϵ����Z����������X���Y�������Ϊ���С����
������ͬ��������Ƕ�����£����Ǹ���ϵ���㴦��ϵ����X��Y��Z�������������ֵ���6��ʾ��
������6 ��ͬ��������Ƕ���ֵ����ϵ������������ֵ(��λ��kN)
����|����|0°����|30°����|60°����|90°����|
����|X|219.84|319.86|222.05|143.40|
����|Y|30.41|263.66|212.54|46.80|
����|Z|13.10|8.36|6.51|9.52|
����4 ����
����������Ҫ������“����”�Ÿ��ʵ���ϵ��������ֳ��ʩ��ˮ�������Է����������ʩ�Ľṹ��ʽ�����Ǽ��˹�������ˮ������������Ҫ����Ƶ����㡢������Ϲ����µ�ʱ����㡣ͨ����ֵ�������õ�������Ҫ�о����ۣ�
����(1)�ڲ�ͬ���������£���ʩ�����һ�ײ������仯�������ƣ���Ƶ��һ�ײ��������������������Ǹ���������˶���
����(2)��ֳ��ʩ�������ɶ��˶���Ӧ��ҪΪ�ݵ�����ҡ����;����������Ƕ���90°ת��ʱ���ᵴ�˶���Ӧ������
����(3)��ͬ������Ϲ����У�0°ˮ����30°�������������ϵ��������ǹؼ�������
�������ź��̼�����չ����ϸ����������ϸ�����ۼ���������ϰ�ȫ�ԣ���ȷ����ĿͶ��ʵʩ��δ����Զ����ֳ��ҵ��չ���·�ʽ��δ����Զ����ֳװ������ϴ��£����ż����о��Ľ�һ�������ϸ�������ṩ����Ԫ�Ľ��������
���������
����[1] ������. ��Զ���ִ�������������һ��������ҵ[J]. ��������ҵ,2018,12:66-67.
����[2] ʯ����,������,¬����,��. �й���Զ������ķ�չ��״��չ��[J]. ˮ��ѧ��,2021,45(6):992-1005.
����[3] �ƹ���,��С��,Ī����. ��Զ����ֳװ�������о���״�뷢չ����[J]. ���������ѧѧ��,2018,2(33):123-129.
����[4] SHAINEE M, LEIRA B J, ELLINGSEN H, et al. Investigation of a self-submersible SPM cage system in random waves[J]. Aquacultural Engineering,2014,58(86):35-44.
����[5] SHAINEE M, ELLINGSEN H, LEIRA B J, et al. Design theory in offshore fish cage designing[J]. Aquaculture,2013,392-395:134-141.
����[6] CIFUENTES C, KIM M H. Hydrodynamic response of a cage system under waves and currents using a Morison-force model[J]. Ocean Engineering,2017,141:283-294.
����[7] MARLEN S I. Modelling of drag forces on a closed flexible fish cage[J]. IFAC Proceedings Volumes,2013,46(33):340-345.
����[8] KIM T, LEE J, FREDRIKSSON D W, et al. Engineering analysis of a submersible abalone aquaculture cage system for deployment in exposed marine environments[J]. Aquacultural Engineering,2014,63:72-88.
����[9] ������,����,ʯ����,��. ��������������������о�[J]. ��ҵ��Ϣ��ս��,2016,31(4):293-298.
����[10] CUMMINS W E. The impulse response function and ship motions[J]. Schiffstechnik,1962,9:101-109.
����[11] LI Y C, ZHAO Y P, GUI F K, et al. Numerical simulation of the hydrodynamic behaviour of submerged plane nets in current[J]. Ocean Engineering,2006,33(17-18):2352-2368.
����[12] �ϴ�ΰ. ��ֳ������Χ�������Ե���ά��ֵģ��[D]. ����:����������ѧ,2012.
����[13] ������. �밶���ʽ����ˮ���������о�[D]. ����:����������ѧ,2013.
����[14] ������. ��ˮ����ʽ����ˮ����������ֵģ���о�[D]. ����:����������ѧ,2007.
����[15] ���Ѹ�. �ߵȽṹ����ѧ[M]. ���:����ѧ������,2002.
����[16] ��ʿ�i,����,����ݼ. �����ѧ����[M]. ����:�ߵȽ���������,1999.
����[17] ������. �밶���ʽ����ˮ���������о�[D]. ����:����������ѧ,2013.
����[18] Ҧ��. ����AQWA�ĵ������ձ�ϵ�������ˮ������Ӧ�о�[D]. ����:����������ѧ,2017.
����[19] �й�������. ����ê���淶[M]. ����:����ͨ������,1995.



